電子ギア、位相オフセット、ギアバックラッシュの補正
を参照してください BasicMotion_SynchronizedMotion.project インストールディレクトリの例 CODESYS 下 ..\CODESYS SoftMotion\Examples。
この例では、位相オフセットとギア バックラッシュ補正と組み合わせて電子ギアボックスを使用する方法を示します。
アプリケーションの構造
アプリケーションは、 PLC_PRG プログラムとトレースは、機能ブロックの機能を簡単に追跡するために使用できます。
軸を有効にするには
MC_Power。(STATE_POWER)同期動作を開始し、マスター軸を位置0と位置100(
STATE_COMMAND_POS_0そしてSTATE_COMMAND_POS_1)。
使用法
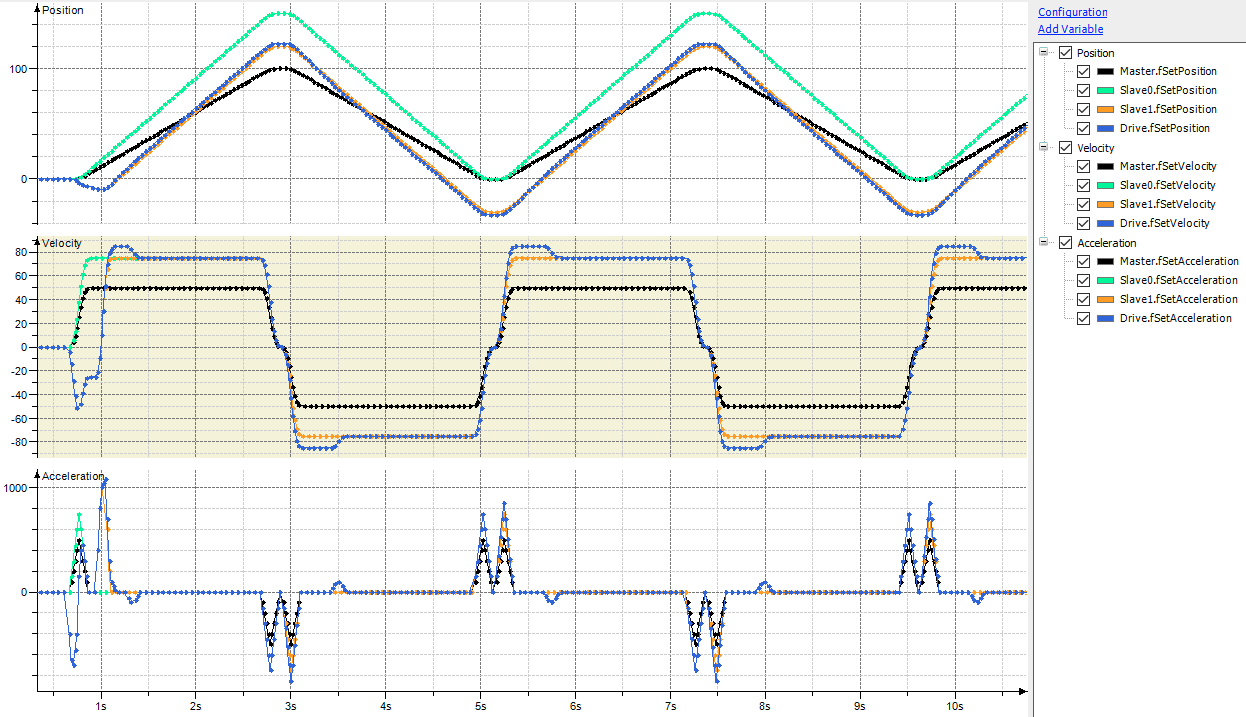
マスター軸 (トレース図の黒) は、最大速度 50 単位/秒で位置 0 と位置 100 の間を連続的に前後に移動します。
電子ギアボックス(MC_GearIn)は、ギア比2:3でマスタームーブメントを Slave0 軸(トレース図の緑色)です。ギアから生じる最大速度は 1 秒あたり 75 単位です。
次に、位相オフセット(MC_Phasing)30単位が適用されます Slave1 軸(トレース図ではオレンジ色)の速度は Slave0 ランプインフェーズを除いて、軸と同じです。
最後に、ギアのバックラッシュ補正を使用して、動きを Drive 軸(トレース図では青)です。デモンストレーションのために、ギアのバックラッシュには非現実的な 5 単位の値が設定されています。図は、動きの開始時と動きの方向が反転するたびに補正動作を示しています。